Motora Senkron a IE5 10000V TYZD Barên Ajotina Rasterast ên Leza Kêm

Taybetmendiyên hilberê
| Voltaja nirxandî | 10000V |
| Rêzeya hêzê | 200-1400kW |
| Zûbûnî | 0-300rpm |
| Pircarînî | Frekansa guhêrbar |
| Dem | 3 |
| Polon | Bi sêwirana teknîkî |
| Rêzeya çarçovê | 630-1000 |
| Çêkirin | B3, B35, V1, V3..... |
| Asta îzolekirinê | H |
| Asta parastinê | IP55 |
| Erka xebatê | S1 |
| Xwesazkirî | Erê |
| Çerxa hilberînê | 30 roj |
| Reh | çîn |
Taybetmendiyên hilberê
• Karîgerî û faktora hêzê ya bilind.
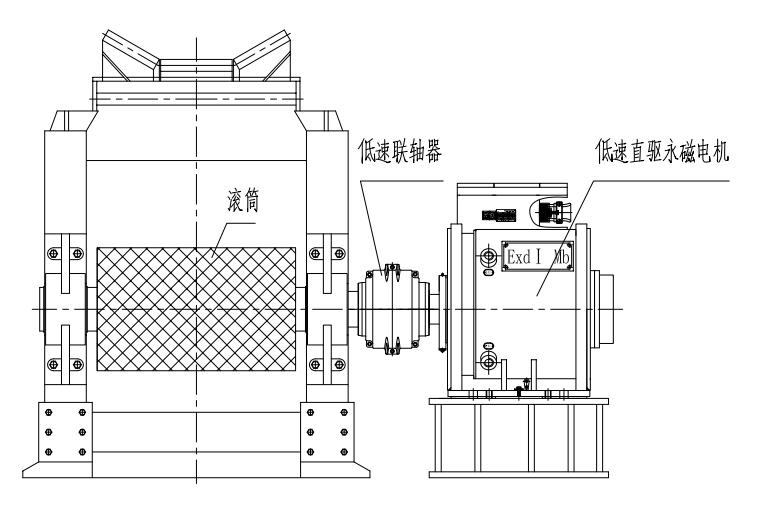
• Tehrîkkirina magnetên daîmî, hewcedariya wan bi herikîna tehrîkkirinê nîne.
• Xebata senkronîze, pulsasyona lezê tune ye.
• Dikare ji bo torka destpêkirinê ya bilind û kapasîteya zêdebarkirinê were sêwirandin.
• Dengê kêm, bilindbûna germahiyê û lerizîn.
• Xebateke pêbawer.
• Bi învertereke frekansê ji bo sepanên leza guhêrbar.
Serlêdanên Berheman
Berhemên rêzefîlmê bi berfirehî di alavên cûrbecûr ên wekî aşên topan, makîneyên kemerê, tevlihevker, makîneyên pompkirina rûnê yên rasterast, pompeyên pistonê, fanên bircê sarkirinê, hilgir û hwd. de di kanên komirê, kanan, metalurjî, hêza elektrîkê, pîşesaziya kîmyewî, materyalên avahîsaziyê û pargîdaniyên din ên pîşesazî û madenê de têne bikar anîn.




Pirsên Pir tên Pirsîn
Bearing çawa têne guhertin?
Hemû motorên ajotina rasterast ên senkron ên bi mıknatîsên daîmî xwedî avahiyek piştgirîya taybetî ji bo beşa rotorê ne, û guheztina beringan li ser cîh wekî ya motorên asenkron e. Guhertin û parastina beringan a paşê dikare lêçûnên lojîstîkê xilas bike, dema parastinê xilas bike, û pêbaweriya hilberîna bikarhêner çêtir biparêze.
Xalên sereke yên hilbijartina motora ajotina rasterast çi ne?
1. Moda xebitandinê ya li ser cîh:
Wekî celebê barkirinê, şert û mercên hawîrdorê, şert û mercên sarkirinê, û hwd.
2. Pêkhate û parametreyên mekanîzmaya veguhestina orîjînal:
Wekî mînak parametreyên plakaya navê kêmker, mezinahiya navrûyê, parametreyên çengelê, wek rêjeya diranan û qulika şaftê.
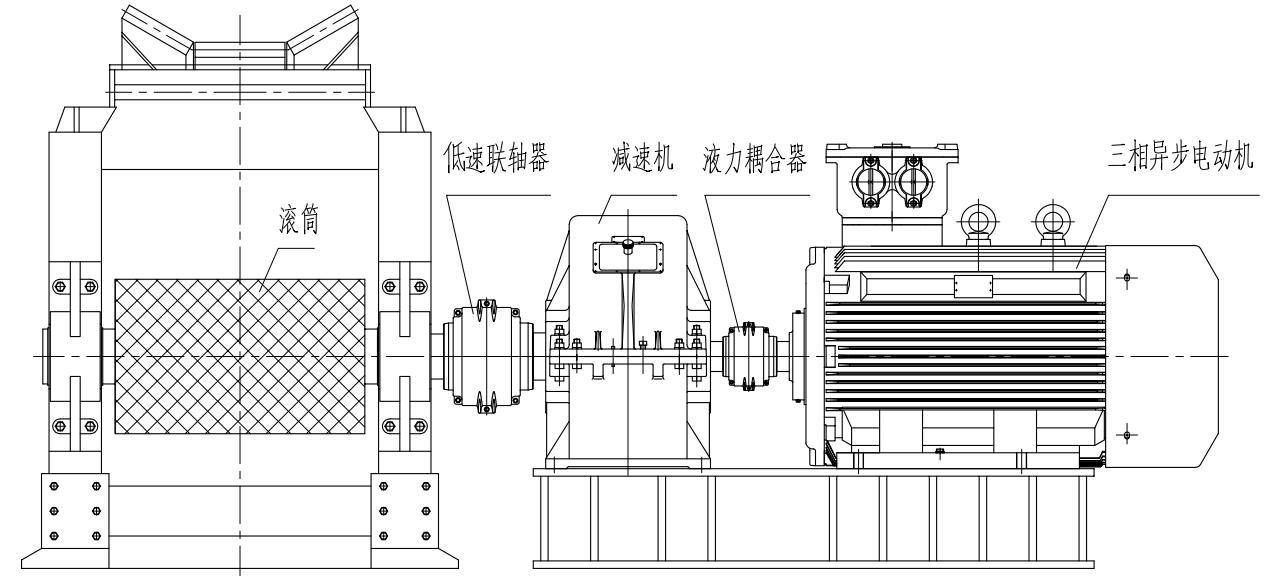
3. Niyeta ji nû ve çêkirinê:
Bi taybetî, gelo ajotina rasterast an ajotina nîv-rasterast were kirin, ji ber ku leza motorê pir kêm e, divê hûn kontrola xeleka girtî bikin, û hin înverter kontrola xeleka girtî piştgirî nakin. Wekî din, karîgeriya motorê kêmtir e, her çend lêçûna motorê bilindtir be jî, lêçûn-bandor ne zêde ye. Pêşkeftin avantaja pêbawerî û bêparastinê ye.
Eger lêçûn û bandoriya lêçûnê girîngtir bin, di hin şert û mercan de çareseriyek nîv-ajotina rasterast dikare guncaw be di heman demê de ku kêmkirina lênêrînê misoger dike.
4. Kontrolkirina daxwazê:
Gelo marqeya înverterê mecbûrî ye, gelo çerxa girtî pêdivî ye, gelo divê mesafeya ragihandinê ya motorê bi înverterê re bi kabîneyek kontrola elektronîkî ve were stendin, divê kabîneya kontrola elektronîkî çi fonksiyonan hebe, û ji bo DCS-ya dûr çi sînyalên ragihandinê hewce ne.




