Motora Senkron a Bi Magnetê Daîmî ya Leza Kêm a IE5 660-1140V TBVF ya Li Dijî Teqînê



Taybetmendiyên hilberê
| Nîşana EX | EX db I Mb |
| Voltaja nirxandî | 660,1140V... |
| Rêzeya hêzê | 37-1250kW |
| Zûbûnî | 0-300rpm |
| Pircarînî | Frekansa guhêrbar |
| Dem | 3 |
| Polon | Bi sêwirana teknîkî |
| Rêzeya çarçovê | 450-1000 |
| Çêkirin | B3, B35, V1, V3..... |
| Asta îzolekirinê | H |
| Asta parastinê | IP55 |
| Erka xebatê | S1 |
| Xwesazkirî | Erê |
| Çerxa hilberînê | 30 roj |
| Reh | çîn |
Taybetmendiyên hilberê
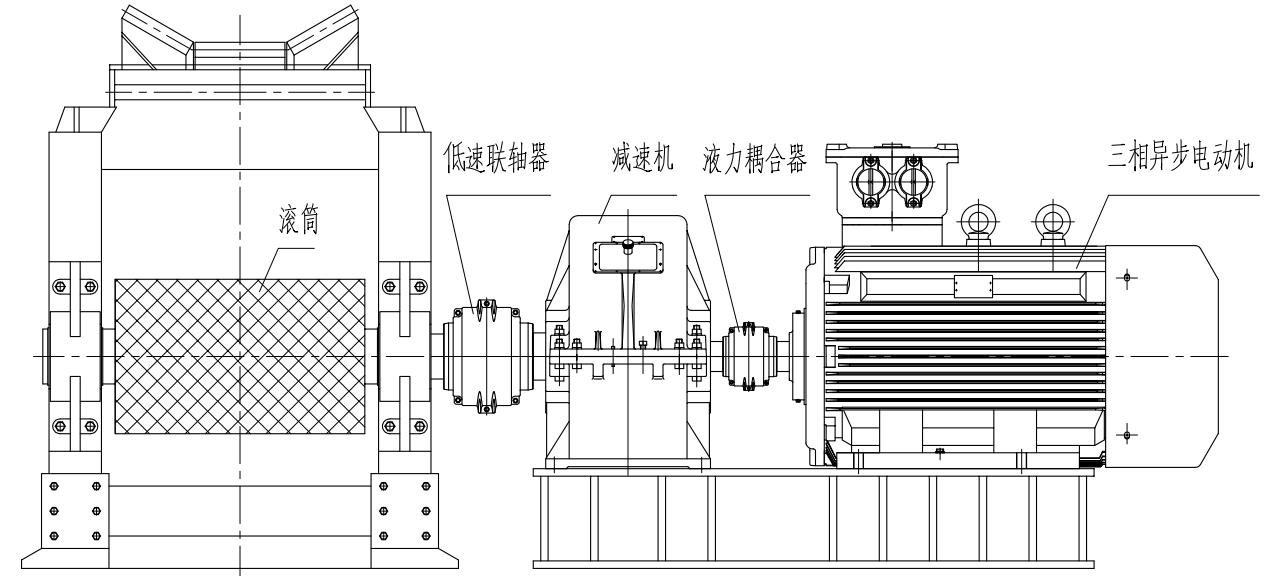
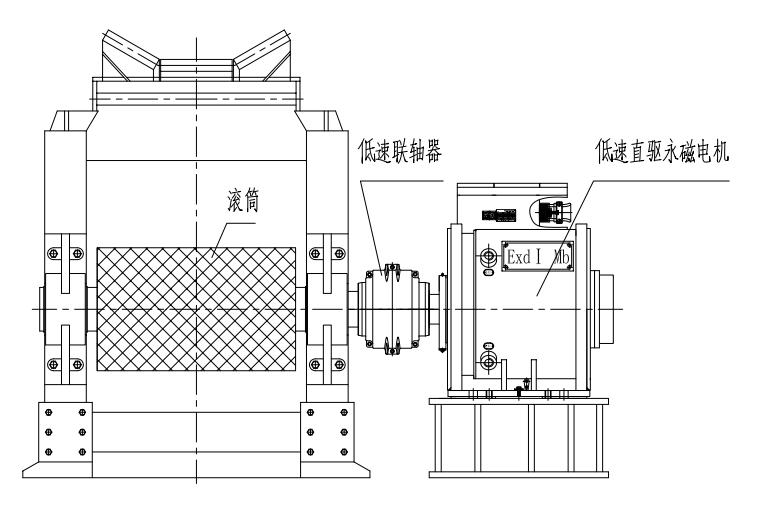
1. Qûtîya gearê û hevgirêdana hîdrolîk ji holê rakin. Zincîra veguhestinê kurt bikin. Pirsgirêka rijandina rûn û dagirtina sotemeniyê tune. Rêjeya têkçûna mekanîkî kêm e. Pêbaweriya bilind.
2. Sêwirana elektromagnetîk û avahîsaziyê ya xwerû li gorî alavan. Ku dikare rasterast hewcedariyên leza û torkê yên ku ji hêla bargiraniyê ve hewce ne bicîh bîne;
3. Herika destpêkê ya nizm û bilindbûna germahiya nizm. Rîska demagnetîzekirinê ji holê radike;
4. Jiholêrakirina windabûna karîgeriya veguhestinê ya qutiya gear û girêdana hîdrolîk. Pergal xwedî karîgeriyeke bilind e. karîgeriyeke bilind û teserûfa enerjiyê ye. Struktureke hêsan. Dengê xebitandinê kêm e û lêçûnên lênêrîna rojane yên kêm in;
5. Beşa rotorê xwedî avahiyek piştgirîya taybetî ye. ku dihêle ku bearing li ser cîh were guheztin. Bi vî awayî lêçûnên lojîstîkê yên ji bo vegerandina kargehê ji holê radike;
6. Pejirandina sîstema ajotina rasterast a motora senkron a bi mıknatîsê daîmî dikare pirsgirêka "hespê mezin erebeya piçûk dikişîne" çareser bike, ku dikare hewcedariya xebitandina rêjeya barkirinê ya fireh a sîstema orîjînal bicîh bîne. û bi karîgeriya bilind û teserûfa enerjiyê karîgeriya giştî ya pergalê baştir bike.
7. Kontrola veguherînera frekansa vektor bikar bînin. Rêjeya leza 0-100%, performansa destpêkê baş e. Xebata stabîl. Dikare katsayiya hevahengiyê bi hêza barkirina rastîn kêm bike.
Serlêdana Berhemê
Ev hilber dikare alavên madena komirê rasterast ajotinê bike, ku bi berfirehî di bin erdê de tê bikar anîn da ku alavên cûrbecûr ên wekî fan, pomp û makîneyên kemerê bikişîne.






Pirsên Pir tên Pirsîn
Xalên sereke yên hilbijartina motora bi leza nizm (rpm) çi ne?
1. Moda xebitandinê ya li ser cîh:
Wekî celebê barkirinê, şert û mercên hawîrdorê, şert û mercên sarkirinê, û hwd.
2. Pêkhate û parametreyên mekanîzmaya veguhestina orîjînal:
Wekî mînak parametreyên plakaya navê kêmker, mezinahiya navrûyê, parametreyên çengelê, wek rêjeya diranan û qulika şaftê.
3. Niyeta ji nû ve çêkirinê:
Bi taybetî, gelo ajotina rasterast an ajotina nîv-rasterast were kirin, ji ber ku leza motorê pir kêm e, divê hûn kontrola xeleka girtî bikin, û hin înverter kontrola xeleka girtî piştgirî nakin. Wekî din, karîgeriya motorê kêmtir e, her çend lêçûna motorê bilindtir be jî, lêçûn-bandor ne zêde ye. Pêşkeftin avantaja pêbawerî û bêparastinê ye.
Eger lêçûn û bandoriya lêçûnê girîngtir bin, di hin şert û mercan de çareseriyek nîv-ajotina rasterast dikare guncaw be di heman demê de ku kêmkirina lênêrînê misoger dike.
4. Kontrolkirina daxwazê:
Gelo marqeya înverterê mecbûrî ye, gelo çerxa girtî pêdivî ye, gelo divê mesafeya ragihandinê ya motorê bi înverterê re bi kabîneyek kontrola elektronîkî ve were stendin, divê kabîneya kontrola elektronîkî çi fonksiyonan hebe, û ji bo DCS-ya dûr çi sînyalên ragihandinê hewce ne.
Cudahiya sereke di navbera windahiyên motorên mıknatîsî yên daîmî yên heman mezinahî de li gorî motorên asenkron çi ye?
Xerckirina kêm a sifirê statorê, xerckirina kêm a sifirê rotorê û xerckirina kêm a hesinê rotorê.





